Antes de iniciar la instalación, verifique el funcionamiento correcto de los sensores. Complete los siguientes pasos:
1.Coloque los sensores en el orden correcto revisando las etiquetas en los sensores y los documentos incluidos.
2.Conecte los sensores enchufando el cable que sale de la parte inferior de un sensor al cable que sale de la parte superior del otro sensor.
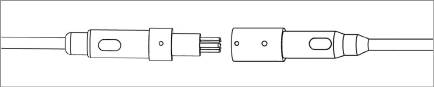
figura 2: Detalle de la conexión de los cables
¡Precaución! Cuando conecte los sensores, asegúrese de alinear las dos marcas guía en la parte externa del conector hembra con la marca guía en la parte externa del conector macho. Esto garantizará que los pines y los agujeros en el interior de los conectores se alineen correctamente. Empuje los conectores macho y hembra el uno hacia el otro hasta que se hayan acoplado completamente.
3.Una vez que todos los sensores estén conectados, enchufe el terminador al conector hembra en el sensor inferior. Vea la figura a continuación.

figura 4: Terminador Modelo 6150F-2
4.Conecte el conjunto a un dispositivo de lectura o registrador de datos.
5.Sostenga el sensor en posición vertical y observe la lectura. El sensor de inclinación debe mantenerse estable mientras se toma la lectura. La lectura observada debería estar cerca de la lectura vertical de fábrica. Las inclinaciones en dirección positiva (A+ o B+, como se marca en el sensor) deberían resultar en lecturas crecientes. Las inclinaciones en dirección negativa (A- o B-) deberían resultar en lecturas decrecientes. La temperatura indicada en el dispositivo de lectura debería ser cercana a la temperatura ambiente. Repita el proceso con los sensores restantes.
6.Una vez completadas las pruebas preliminares, desconecte el conjunto del dispositivo de lectura.
7.Desconecte todos los cables de los sensores. (El terminador puede permanecer en el sensor inferior).
En caso de que cualquiera de estas pruebas preliminares falle, vea Sección 5 para identificar y solucionar el problema.
Cada sensor de inclinación viene con un sujetador fijado y con un tubo conector no fijado. Para completar el ensamblaje de cada segmento, haga lo siguiente:
1.Retire el sujetador tuerca/tornillo del sensor de inclinación.
2.Conecte el tubo espaciador al conector en la parte inferior del sensor de inclinación.
3.Fije el tubo al sensor usando las tuercas/tornillos retirados en el paso 1.
4.Repita los pasos 1-3 para cada juego de sensor de inclinación/tubo espaciador.
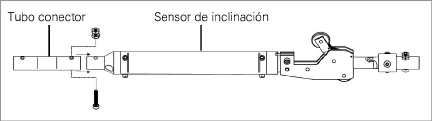
figura 5: Conecte el ensamblaje del segmento
TENGA EN CUENTA:
□Los tornillos de casquete de una pulgada usados en el procedimiento de ensamblaje se instalan en los tubos conectores en la fábrica y deben ser retirados antes de conectar los tubos.
□El conjunto se envía con varios tornillos de casquete y tuercas de repuesto. Los tornillos de casquete más cortos, de 3/8" son repuestos para los tronillos que conectan los ensamblajes de las ruedas.
□Cuando el espacio entre los sensores sea demasiado largo para una longitud continua de tubería, conecte dos tubos usando el empalme para tubos 6300-7 (vea la figura a continuación). Use los tronillos de casquete de una pulgada y las tuercas para asegurar esta conexión.
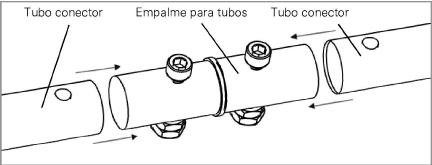
figura 6: Empalme para tubos 6300-7
□Use compuesto para roscas Loctite 222 en todas las conexiones roscadas.
Cada sensor de inclinación se suministra con sujetadores adjuntos. Para completar el montaje de cada segmento, haga lo siguiente:
1.Quite las tuercas y tornillos de fijación del sensor.
2.Conecte un conjunto de rueda a la parte superior del sensor.
3.Conecte un conjunto de rueda a la parte inferior del sensor.
4.Repita los pasos 1-3 para cada sensor.
5.Conecte los sensores juntos conectando un cable a los ganchos oculares de los sensores adyacentes.
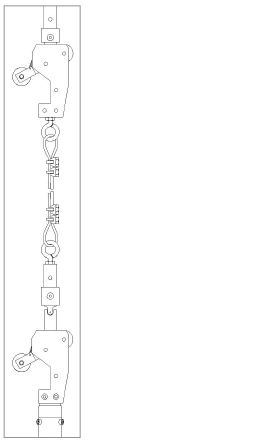
figura 7: Segmentos de conectando de cables
2.3.1Ensamblaje de la rueda inferior
El ensamblaje de la rueda inferior, modelo 6300-5, no tiene junta universal, solo una placa giratoria. Fije este ensamblaje de la rueda al segmento inferior usando los herrajes incluidos.

figura 8: Conecte el ensamblaje de la rueda inferior
Nota: Recuerde usar Loctite 222 en todas las conexiones roscadas.
Se recomienda encarecidamente fijar un cable de seguridad al ensamblaje de la rueda inferior. Este se puede usar para recuperar el ensamblaje si una de las uniones se suelta y también resulta útil al bajar el ensamblaje en la carcasa.
Los cables de seguridad comprados a geokon incluyen un perno de argolla en un extremo. Deslice el perno de argolla en el tornillo de casquete 10-32 usado para fijar el segmento inferior al ensamblaje de la rueda inferior. Apriete otra tuerca al tornillo de casquete, esto atrapará el cable de seguridad entre las dos tuercas. El ensamblaje de la rueda inferior terminado se muestra en la figura a continuación.
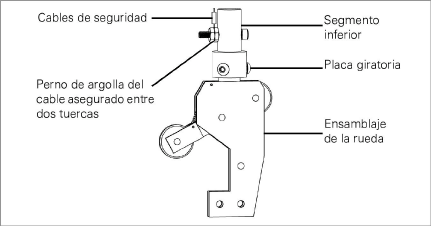
figura 9: Conecte el cable de seguridad
Todos los ensamblajes de las ruedas deben orientarse en la misma dirección cuando se instalen en la carcasa. Los ensamblajes de las ruedas se colocan en la fábrica de forma que la rueda fija esté viendo en la dirección A+ del sensor (como se muestra en la figura por debajo).
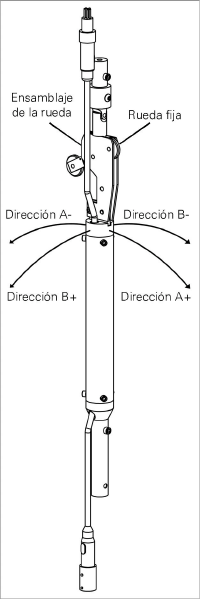
Es habitual y recomendable apuntar la dirección A+ (rueda fija) en la misma dirección del movimiento anticipado, es decir, hacia la excavación que se monitorea o pendiente abajo para aplicaciones de estabilidad de pendientes.
Se incluye un segundo dispositivo MEMS en el sensor y está conectado con su dirección 90º positiva en sentido de las manecillas del reloj respecto al primer dispositivo. Esta es la dirección B+ del sensor.
1.Inserte el ensamblaje de la rueda inferior en la carcasa, asegurándose de orientar correctamente rueda fija (ver Sección 2.3.2).
2.Usando el cable de seguridad, baje el segmento inferior por el agujero de la carcasa hasta que el sensor inferior se encuentre en la parte superior de la carcasa.
3.Sostenga el segmento en su lugar, en la parte superior del segmento, usando prensas sujetadoras o un método similar.
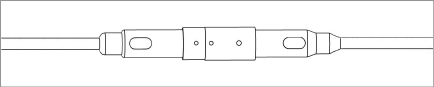
4.Enchufe el conector macho del sensor inferior al conector hembra del sensor superior.
¡Precaución! Cuando conecte los sensores, asegúrese de alinear las dos marcas guía en la parte externa del conector hembra con la marca guía en la parte externa del conector macho. Esto garantizará que los pines y los agujeros en el interior de los conectores se alineen correctamente. Empuje los conectores macho y hembra el uno hacia el otro hasta que se hayan acoplado completamente.
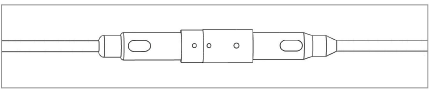
figura 11: Detalle de la conexión de los cables
5.Pegue el cable de señal con cinta a la tubería, si así lo desea. Se pueden pegar los conectores con cinta para agregar seguridad.
6.Usando el cable de seguridad, baje el segmento inferior por el agujero hasta que el siguiente sensor se encuentre en la parte superior de la carcasa. Asegúrese de orientar correctamente la dirección A+ del sensor al insertarlo en la carcasa.
7.Continúe agregando sensores al conjunto. Conecte los cables de los sensores y baje el conjunto a la carcasa hasta que el sensor de más arriba se encuentre en línea con la parte superior de la carcasa.
2.3.4Conexión del soporte de suspensión
Conecte el soporte de suspensión al ensamblaje de la rueda superior usando uno de dos métodos: use un cable (se vende por separado) o use el tubo conector incluido.
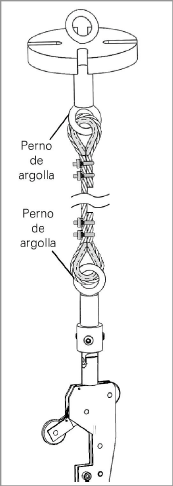
figura 12: Suspensión por cable
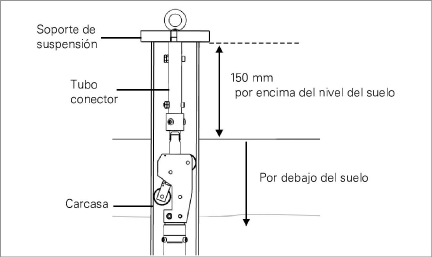
figura 13: Suspensión por tubo
Baje el sensor final a la carcasa y ubique el soporte de suspensión en la parte superior de la carcasa. Es importante que la corona superior de la carcasa esté relativamente pareja para prevenir cualquier interferencia lateral con el ensamblaje de la rueda del sensor superior.
Ahora, el cable de seguridad puede amarrarse en la parte superior de la carcasa y el cable de señal puede llevarse a la ubicación del dispositivo de lectura. Se pueden tomar lecturas inmediatamente después de la instalación, pero se recomienda dejar pasar unas horas para permitir que se estabilice el sistema antes de registrar las lecturas iniciales (cero).
2.4Convertidor TTL Y/O USB a RS-485 Modelo 8020-38
geokon fabrica el Convertidor Bus Direccionable Modelo 8020-38 para conectar conjuntos de sensores direccionables a computadoras personales, dispositivos de lectura, registradores de datos y controladores lógicos programables. El convertidor actúa como puente usando los protocolos TTL o USB entre los lectores y los conjuntos de sensores habilitados para RS-485 de geokon.
Para obtener más información, consulte el Manual de instrucciones del Modelo 8020-38.
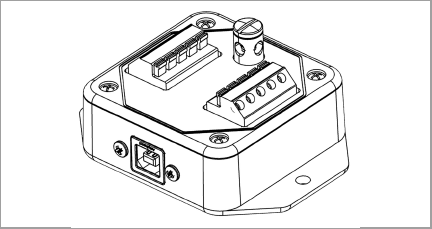
figura 14: Convertidor TTL/USB a RS-485 Modelo 8020-38
Nota: El registrador que utilice debe contar con el conector apropiado.
■Si su registrador de datos no cuenta conversión RS-485 incorporada, conecte el cableado usando el diagrama en Figura 15.
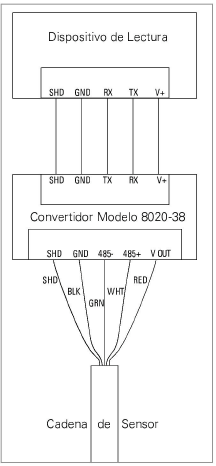
figura 15: Cableado de dispositivo de lectura sin conversión RS-485
■Si su registrador de datos cuenta conversión RS-485 incorporada, conecte conecte el cableado usando el diagrama en Figura 16.
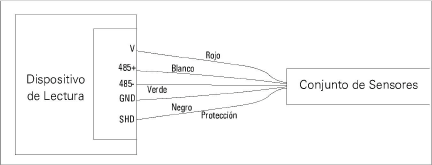
figura 16: Cableado de registrador de datos con conversión RS-485 incorporada
2.5Conector de seis pines resistente al agua
Los pines de los conectores macho y hembra de seis pines se muestran a continuación; la función de cada cable se detalla en Tabla 1 a continuación.
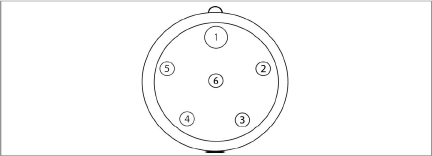
figura 17: Conector macho resistente al agua
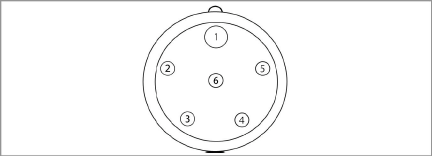
figura 18: Conector hembra resistente al agua
|
Pin |
Color del cable |
Función |
|
1 |
Rojo |
Alimentación |
|
2 |
Negro |
Conexión a tierra |
|
3 |
Blanco |
RS-485+ Datos Alto |
|
4 |
Verde |
RS-485- Datos Bajo |
|
5 |
Desnudo |
Drenado de protección |
|
6 |
N/C |
N/C |